یکی از پارامترهای مهم در طراحی همزنها به منظور جلوگیری از ایجاد خمش در شفت، ممان اینرسی میباشد. زیرا در هنگام شروع به کار همزن، شفت در معرض انواع تنشها قرار میگیرد که باید بتواند در برابر آنها مقاومت نماید و دچار خمش نگردد. از این رو در این مطالعه، ابتدا با مفهوم اینرسی، ممان اینرسی و نحوه محاسبه آن آشنا شده و در انتها نحوه انتخاب شفت را بر اساس این پارامتر بررسی خواهیم کرد. پس از مطالعه این مقاله، پاسخی مناسب برای پرسشهای زیر خواهید یافت.
مفهوم اینرسی یا لختی چیست؟
ممان اینرسی یا لختی دورانی چیست؟
چه پارامترهایی بر ممان اینرسی تأثیرگذار است و چگونه محاسبه میشود؟
انرژی جنبشی دورانی چیست و چگونه محاسبه میشود؟
ممان اینرسی چه تاثیری بر شفتهای انتقال نیرو در همزنها دارد؟
هدف و کاربرد سافت استارتر چیست؟
اینرسی (inertia)
طبق قانون اول نیوتن، اگر به جسمی نیرو وارد نشود و یا برآیند نیروهای وارد بر جسم صفر باشد، اگر جسم در حالت سکون (Rest) باشد، ساکن میماند و اگر با سرعت ثابت در حال حرکت باشد، به حرکت یکنواخت خود با سرعت ثابت بر روی خط راست (Moving at a constant speed in a straight line) ادامه میدهد. این فرضیه به عنوان قانون اینرسی یا لختی شناخته میشود. اینرسی به معنی تمایل جسم به حفظ وضع حرکتی خود است و هرچه جرم یک جسم بیشتر باشد، اینرسی آن بیشتر خواهد بود. در واقع، به حرکت در آوردن آن از حالت سکون یا متوقف کردن آن در حین حرکت سختتر میباشد. بطورکلی، قانون اینرسی به معنی مقاومت جسم هندسی در برابر تغییر سرعت و جهت حرکت آن است.
ممان اینرسی
ممان اینرسی یا لختی دورانی، مقاومتی است که اجسام در هنگام شروع به حرکت دایرهای از خود به نمایش میگذارند. در حقیقت، اگر جسم ساکنی را توسط نیرویی وادار به چرخش (تغییر جهت حرکت) نماییم، با مقاومتی مواجه میشویم که به آن مقاومت، ممان اینرسی (Moment of Inertia) گفته میشود. این کمیت، از جمع حاصلضربهای جرم هر ذره در مربع فاصله آن ذره تا محور دوران به دست میآید. پس بطورکلی، پارامتر ممان اینرسی به معنای مقاومت و ایستایی جسم در برابر دَوَران یا چرخاندن است که مقدار آن به دو پارامتر جرم جسم و فاصله آن از محور چرخش بستگی دارد. هرچه ممان اینرسی یک مقطع بیشتر باشد؛ میزان تنش و تغییرشکل خمشی آن مقطع کمتر است. در ادامه روابط ریاضی حاکم بر این خاصیت فیزیکی و نحوه محاسبه آن را بررسی میکنیم.
محاسبه و فرمولبندی ممان اینرسی
زمانیکه میخواهیم استوانهای را مطابق شکل زیر، در محیطی با تلفات و اصطکاک صفر، حول محور Z بچرخانیم؛ در ابتدا باید میزان انرژی که برای شروع چرخش استوانه نیاز داریم محاسبه نماییم. انرژی جنبشی هر جسم متحرکی برابر است با:
(1)
یعنی استوانه برای چرخش حول محور خود، نیاز به مصرف K ژول انرژی دارد؛ که در این رابطه m جرم استوانه و V سرعت خطی استوانه است.از سرعت خطی به این دلیل استفاده میشود که سرعت هر نقطه بر روی استوانه با فاصله گرفتن از مرکز افزایش پیدا میکند. به عبارت دیگر در یک جسم دوار سرعت ثابت معنا ندارد و در قطر های مختلف سرعت های مختلفی داریم. نحوه محاسبه سرعت خطی برابر است با:
(2)
دررابطه فوق، rفاصله نقطه مشخص روی استوانه از محور دوران و N تعداد دور چرخش بر واحد ثانیه است. اگر رابطه سرعت را در رابطه (1) قرار دهیم، خواهیمداشت:
(3)
که به آن انرژی جنبشی دورانی میگویند. اگر عبارت را با I و 2πN را با W نمایش دهیم، میتوان رابطه انرژی جنبشی را به صورت فرمول زیر بازسازی کرد که I ممان اینرسی جسم دوار میباشد. در نتیجه، برای چرخاندن جسم باید بر مقاومت مشخص I=mr2غلبه نماییم که این امر نیازمند صرف انرژی است.
(4)
نحوه انتخاب شفت انتقال نیرو در طراحی میکسرها
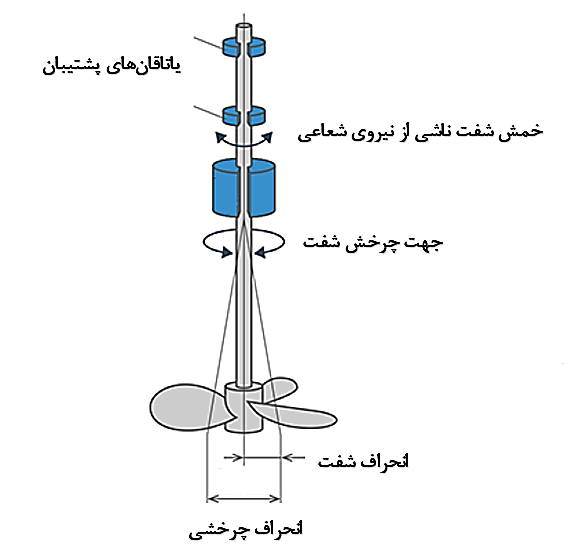
شفت انتقال نیرو، یک قطعه مکانیکی استوانهای است که با دوران آن، گشتاور از یک وسیله محرک مانند الکتروموتور به یک تجهیز مکانیکی دیگر منتقل میشود. این قطعه، هم در هنگام روشن شدن محرک و هم در زمان کارکرد در معرض انواع تنشهای شعاعی و محوری قرار دارد (شکل 2). از این رو، شفت باید به گونهای طراحی و انتخاب شود که در مقابل این تنشها مقاومت مناسبی داشته باشد. درصورتیکه ابعاد، نوع و جنس شفت به درستی انتخاب نشده باشد، منجر به آسیب بر روی آن خواهد شد. یکی از تنشهای شعاعی مهم و رایج، تنش خمیدگی یا خمش (Bending Stress) است. در اثر این تنش، شفت نسبت به محور دورانِ خود تمایل به خمیدگی و انحراف دارد و اگر این تنش بیش از حد مجاز باشد احتمال تسلیم شدن آن وجود دارد. در این شرایط، یکی از مؤلفههای مهم برای حفاظت از شفت در برابر تسلیم شدن، وجود پارامتر ممان اینرسی است. هرچه ممان اینرسی شفت بیشتر باشد، مقاومت آن در برابر نیروی خمش ناشی از دَوَران نیز بیشتر خواهد بود. (توجه گردد طبق رابطه بالا، ممان اینرسی ربطی به جنس و متریال شافت ندارد)
شکل 2: شماتیک خمش شفت در شروع دوران
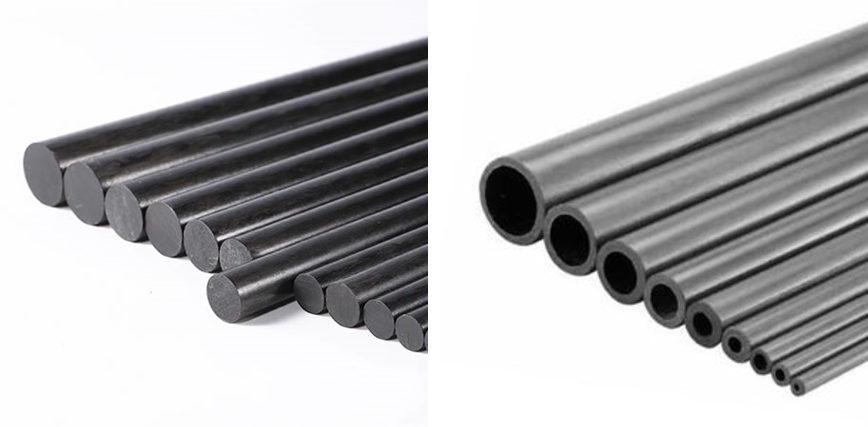
همانطور که بیان شد در طراحی میکسرها، توجه به ممان اینرسی شفت میتواند به افزایش طول عمر و کیفیت میکسر کمک کند. بطورکلی در طراحی میکسرها، جهت انتقال نیروی دَوَرانی از انواع مختلف شفتهای توپُر (Solid Shaft) و توخالی (Hollow Shaft) استفاده میشود (شکل3) که شفتهای توخالی خود براساس ضخامت دیواره به چندین زیرگروه مانند Schedule 5, 10, 40, 80 S, …تقسیم میشوند. در طراحی، زمانیکه دو شفت انتقال نیروی توپر و توخالی با «جرم برابر» داریم؛ نحوه انتخاب از بین این دو شفت کاملا وابسته به ممان اینرسی آنهاست.
شکل 3: انواع شفت
ممان اینرسی برای شفت توخالی و توپُر حول محور مرکزی از روابط زیر بدست میآید:
ممان اینرسی شفت توخالی:
ممان اینرسی شفت توپر:
با فرض جرم برابر در دو شفت، شعاع خارجی شفت توخالی (R2)، بزرگتر از شعاع شفت توپُر (R) خواهد بود؛ (زیرا ابعاد شفت توخالی بایستی بزرگتر باشد تا جرمی معادل جرم شفت توپُر ایجاد کند)، لذا ممان اینرسی شفت توخالی بزرگتر خواهد بود. در جدول زیر، ممان اینرسی دو شفت توخالی و توپُر با جرم و طول یکسان آمده است. همانطور که مشخص است، شفت توخالی ممان اینرسی بیشتری نسبت به توپُر دارد، بنابراین، مقدار خمش شفت توخالی کمتر از توپُر خواهد بود.
نحوه جلوگیری از آسیبهای ناشی از ممان اینرسی در راهاندازی موتورها
در تجهیزات دوار مانند همزنها، هنگام راهاندازی الکتروموتورها به علت هجوم مستقیم ولتاژ و افزایش آنی سرعت، انرژی جنبشی دورانی زیادی به صورن آنی به تجهیز وارد میشود. از طرفی میدانیم به دلیل وجود ممان اینرسی، تجهیزات دوار در ابتدا نسبت به چرخش مقاومت مینمایند. این مقاوت زیاد و ناگهانی در مقابل انرژی جنبشی آنی، سبب ایجاد انواع تنشها و در نتیجه آسیب دیدن دستگاه میشود. از اینرو، برای کاهش تنشها و افزایش طول عمر سیستم نیاز به کنترل جریان راهاندازی الکتروموتور میباشد. یکی از روشهای کنترل جریان در هنگام راهاندازی، استفاده از سافت استارتر (Soft Starter) و درایو فرکانس متغیر (Variable Frequency Drive) میباشد. استفاده از سافت استارتر منجربه راهاندازی نرم الکتروموتور و استفاده از درایو فرکانس متغیر نیز امکان راه اندازی نرم،کنترل و تغییر سرعت موتور را فراهم میآورد. به همین دلیل با بکارگیری از این تجهیزات الکتریکی میتوان از آسیبهای احتمالی ناشی از ممان اینرسی در زمان راهاندازی سیستم جلوگیری نمود. درباره این تجهیزات الکتریکی و نحوه عملکرد آنها به طور مفصل در مقاله سافت استارتر و درایو فرکانس متغیر بحث شده است.
نتیجهگیری
به عنوان یک نتیجهگیری کلی، چنانچه در انتخاب ابعاد مقطع شفت محدودیتی وجود نداشته باشد، در یک جرم برابر، از آنجاییکه ممان اینرسی شفت توخالی بیشتر از شفت توپُر میباشد؛ استفاده از شفت توخالی به دلیل ممان اینرسی بیشتر و در نتیجه مقاومت بیشتر در برابر تغییرشکلهای ناشی از انواع تنشها میتواند بهینهتر باشد. اما چنانچه محدودیت ابعادی برای انتخاب مقطع شفت وجود داشته باشد؛ استفاده از شفتهای توپُر پیشنهاد میگردد.